
Gracias a Sean Harper por permitirme y animarme a traducir sus trabajos, El original aquí: The War Quants Counter-UAS Primer: Sensing. Part 2 of Breaking the UAS Kill Chain, Oct 14, 2025.
Parte 2 de Rompiendo la Kill Chain de los UAS
Conclusión inicial:
1. El rendimiento de los sensores varía considerablemente en función del entorno, la latencia y el perfil del objetivo.
Ningún sensor funciona perfectamente por sí solo; el modelado del rendimiento ayuda a equilibrar el coste, la cobertura y las limitaciones.
2. Las redes de sensores en capas con múltiples tipos de sensores pueden superar las limitaciones del entorno y del perfil del objetivo, y son cruciales para detectar y contrarrestar las amenazas de los UAS pequeños. Los sistemas de radar, RF, EO/IR y acústicos aportan sus propias ventajas, pero la fusión integrada ofrece una conciencia operativa superior.
3. Los comandantes necesitan herramientas de planificación basadas en simulaciones para la defensa CUAS a fin de comprender estas compensaciones y los requisitos de los sensores.
La capa de sensores: ver el enjambre antes de que ataque
El primer paso para derrotar una amenaza de drones es detectarla. Sin embargo, el reto de detectar pequeños UAS (sUAS), que a menudo son silenciosos, lentos y vuelan a baja altura, introduce un nivel de complejidad que los sistemas de defensa aérea tradicionales no están diseñados para manejar. Los obstáculos ambientales, como el vuelo de las aves, pueden confundir a los sensores y dar lugar a falsos positivos. Los sistemas modernos de contramedidas contra UAS requieren una arquitectura de sensores en capas que combine múltiples modalidades, incluyendo RF, radar, acústica, EO/IR y fusión de datos, para integrar todos estos componentes. El modelado y la simulación de estos sistemas de sistemas ayuda aún más a los usuarios a optimizar su empleo. Este artículo es la segunda parte de la Guía básica sobre CUAS de War Quants y profundiza en el modelado de sensores CUAS en los campos de batalla modernos.
El ciclo de detección, seguimiento, identificación y derrota (DTID)
La cadena de destrucción CUAS se puede simplificar en cuatro pasos básicos: detectar, rastrear, identificar y derrotar. Estos cuatro pasos se describen en los documentos CUAS del Cuerpo de Marines y se alinean estrechamente con el ciclo de selección de objetivos F2T2EA presentado en la introducción de este manual. El ciclo, que se resume a continuación, requiere sensores y la fusión coordinada de datos entre ellos para detectar, rastrear e identificar amenazas sUAS.
El proceso DTID puede servir como modelo básico para predecir la probabilidad de éxito en un enfrentamiento CUAS. Para lograr un enfrentamiento exitoso, un sistema debe primero detectar el objetivo, establecer un seguimiento, identificarlo y luego llevar a cabo un enfrentamiento exitoso. Modelar todos estos eventos como independientes, cada uno con su propia probabilidad de éxito, permite a los analistas derivar la probabilidad general de éxito, como se muestra en la figura siguiente.
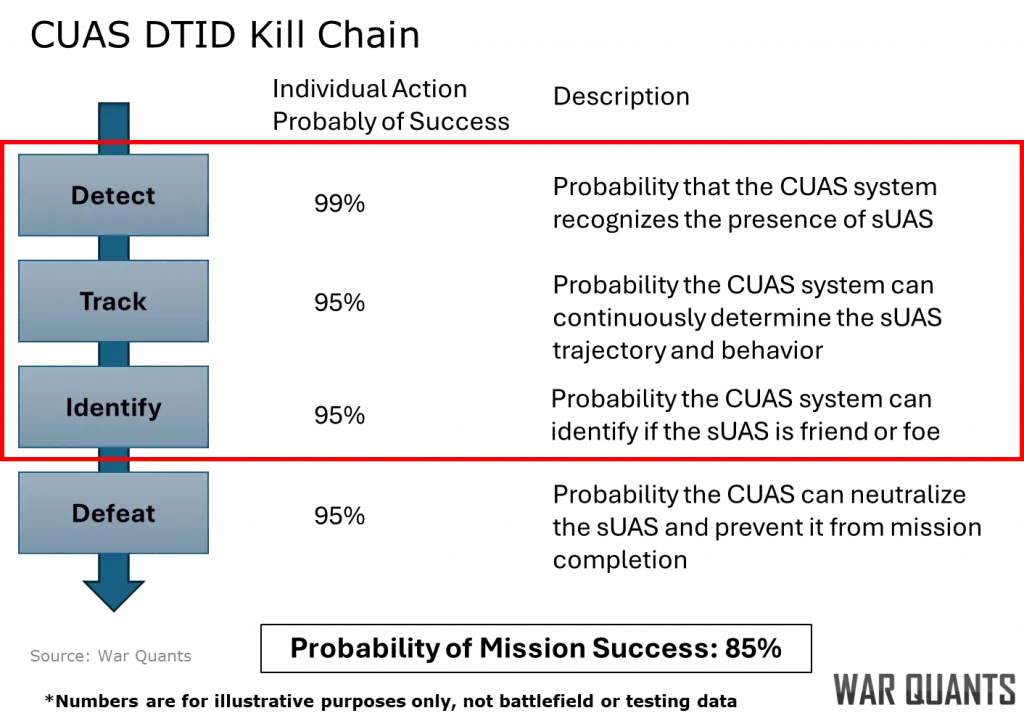
En el caso mostrado, el sistema CUAS tiene una probabilidad del 99 % de detectar, un 95 % de rastrear y un 95 % de identificar un sUAS. Si se combina con una probabilidad de derrota del 95 %, la probabilidad global de derrotar a un sUAS es del 85 %. Esta probabilidad puede parecer alta; sin embargo, solo corresponde a derrotar seis sUAS de media antes de que uno logre atravesar la defensa. Los futuros sistemas CUAS requerirán tasas de éxito significativamente más altas.
Tipos de sensores CUAS
Los sensores CUAS se dividen en dos categorías principales: sensores pasivos, que no emiten energía, y sensores activos, que emiten energía. Dentro de estas dos amplias categorías, hay una gran variedad de opciones de sensores disponibles.
Sensores pasivos:
La observación visual sigue siendo un elemento fundamental en las operaciones CUAS, especialmente en entornos en los que los sensores electrónicos se ven degradados o no están disponibles. Como se destaca en el documento ATP 3-01.81 Counter-Unmanned Aircraft System Techniques del Ejército de los Estados Unidos, los guardias aéreos entrenados actúan como detectores de primera línea, proporcionando una alerta temprana crítica y la confirmación visual de las amenazas aéreas. Estos observadores, equipados con prismáticos o telescopios, suelen trabajar en coordinación con sistemas de detección acústica y de radiofrecuencia, dirigiendo sus ópticas hacia los posibles ejes de amenaza para una rápida identificación. Los observadores humanos son especialmente valiosos en terrenos complejos, como entornos urbanos o con vegetación densa, donde la línea de visión electrónica se ve obstruida y los drones pueden volar por debajo de la cobertura del radar. La observación visual también ofrece un perfil de cero emisiones, lo que es fundamental en operaciones de baja visibilidad, y permite identificar con gran fiabilidad el tipo de dron, su carga útil y su intención. Sin embargo, la eficacia de la observación visual se ve limitada por la luz del día, las condiciones meteorológicas y las exigencias cognitivas y físicas que se imponen al personal. A pesar de estas limitaciones, la observación visual sigue siendo indispensable, especialmente para la defensa de pequeñas unidades y formaciones desplegadas en primera línea que carecen de conjuntos de sensores avanzados.
Los sistemas de detección acústica ofrecen un método pasivo y rentable para identificar y rastrear drones mediante la captura de las señales acústicas únicas de sus hélices y motores. Estos sistemas utilizan conjuntos de micrófonos para detectar estas señales acústicas, que luego se analizan mediante algoritmos de aprendizaje automático para clasificar los tipos de drones, como por ejemplo, distinguir entre diferentes sUAS. Las técnicas de triangulación, basadas en la diferencia de tiempo de llegada (TDOA) de múltiples micrófonos, permiten calcular la orientación y el alcance de un dron. Si bien la detección acústica es particularmente eficaz en entornos rurales tranquilos, su rendimiento puede verse degradado en condiciones ruidosas o ventosas.
Un ejemplo notable de detección acústica en la práctica es el despliegue por parte de Ucrania de una red nacional de casi 10 000 sensores acústicos, conocida como «Sky Fortress». Desarrollado por dos ingenieros ucranianos, este sistema utiliza sensores económicos, con un coste de entre 400 y 500 dólares cada uno, para detectar las señales acústicas de los drones entrantes, como el Shahed-136 de fabricación iraní. Los datos recopilados se procesan de forma centralizada y se transmiten a equipos móviles de fuego equipados con armas antiaéreas, lo que les permite interceptar los drones de forma eficaz. Esta solución escalable y de bajo coste ha despertado el interés del ejército estadounidense y de los aliados de la OTAN como modelo para estrategias de defensa aérea asequibles.
Los sistemas electroópticos/infrarrojos (EO/IR) son modalidades de sensores de línea de visión que permiten la confirmación visual, la evaluación de los daños en combate y el traspaso de objetivos en un sistema CUAS. Los sistemas EO, normalmente activados por sensores de radiofrecuencia o radar, proporcionan un seguimiento en tiempo real durante el día mediante la detección del movimiento y el contraste de formas con respecto al terreno de fondo. Los sensores infrarrojos mejoran esta capacidad al detectar las señales térmicas de los motores de los drones y los componentes electrónicos a bordo, especialmente durante las operaciones matutinas o nocturnas. Las modernas bolas sensoriales multiespectrales montadas en vehículos, torres y plataformas UAS ofrecen cardanes estabilizados con seguimiento automatizado, que a menudo integran señales EO e IR para aumentar la probabilidad de detección. A menudo, los sistemas integran visión artificial o computacional en las señales de vídeo EO/IR para automatizar la detección e identificación de objetivos. Las condiciones meteorológicas, la oscuridad y la mala iluminación pueden dificultar la detección, mientras que la visión artificial periférica requiere una potencia y unos recursos de procesamiento informático considerables.
La detección por radiofrecuencia (RF) es una piedra angular de los modernos sistemas C-UAS (contra UAS), ya que ofrece un medio pasivo y no emisivo de identificar amenazas. Los detectores pasivos de RF supervisan las frecuencias comunes de control y telemetría, como 2,4 GHz y 5,8 GHz, para detectar enlaces de mando y control (C2) y señales de vídeo en primera persona (FPV), lo que resulta especialmente eficaz contra los drones pilotados manualmente. Los sistemas avanzados utilizan decodificadores sensibles al protocolo que pueden extraer metadatos, como los ID de los drones y los tipos de modelos, incluso de enlaces cifrados, aprovechando bibliotecas de firmas patentadas y el aprendizaje automático de radiofrecuencia (RFML). Las redes de triangulación de RF geolocalizan tanto los drones como a sus operadores correlacionando los datos de dirección de llegada de múltiples nodos, lo que es fundamental para identificar los puntos de lanzamiento de enjambres o los centros C2. Además, las herramientas de análisis del espectro pueden aislar la actividad de RF anómala en entornos electromagnéticos congestionados para señalar posibles amenazas. Si bien los sistemas basados en RF destacan en la alerta temprana de largo alcance, son menos eficaces contra los drones autónomos o conectados que emiten señales de RF mínimas o nulas. Por ejemplo, los ejércitos de Ucrania y Rusia utilizan drones de ataque unidireccionales controlados por fibra óptica que no pueden detectarse con RF pasiva.
Sensores activos:
Los sistemas de radar proporcionan una capa esencial de capacidad CUAS al detectar amenazas aéreas en condiciones meteorológicas adversas, tanto de día como de noche. Como se señala en Principles of Naval Weapon Systems, el radar destaca en la identificación de objetivos aislados en fondos con poco ruido. Los modernos radares activos de corto alcance, que operan en las bandas Ku-, X- y Ka-, pueden diseñarse específicamente para detectar y rastrear drones pequeños con una sección transversal de radar (RCS) baja. Estos sistemas suelen incorporar filtros Doppler bajos para rastrear sUAS que se mueven lentamente o que se mantienen en vuelo estacionario, una característica común de las amenazas del grupo 1-2. Por su parte, el radar pasivo utiliza señales ambientales, como la radio FM, las emisiones de televisión o las torres LTE, para detectar reflejos, lo que permite una detección sigilosa en entornos con interferencias electrónicas sin emitir sus propias señales. A pesar de estas ventajas, el rendimiento del radar puede verse degradado en entornos con mucho ruido a baja altitud (por ejemplo, terreno urbano) y está intrínsecamente limitado por la pequeña RCS de muchos drones.
Software y fusión de señales
El software y la fusión de señales constituyen la columna vertebral de las redes CUAS escalables y adaptables, ya que permiten una mejor coordinación entre las diversas modalidades de sensores. Los motores de fusión integran las entradas del radar, la RF, el EO/IR y las fuentes acústicas para producir una imagen unificada de las amenazas, lo que mejora la precisión de la detección y reduce la latencia mediante el cruce automático de señales. Estos sistemas priorizan y rastrean las amenazas de forma dinámica, asignando puntuaciones de confianza y optimizando las tareas de los sensores en tiempo real. Los modelos avanzados de IA/ML enriquecen aún más el proceso al clasificar las funciones de los drones, como ISR frente a ataque, basándose en patrones de comportamiento, emisiones y trayectoria, al tiempo que señalan anomalías como las firmas previas al lanzamiento de enjambres. Esta integración multicapa mejora la agilidad táctica y la velocidad de decisión en todos los escalones, lo que convierte al software de fusión en un multiplicador de fuerzas en entornos complejos. Sin embargo, estas ventajas conllevan importantes exigencias: los sistemas de fusión multisensor requieren una amplia integración, un ancho de banda considerable para la transmisión de datos en tiempo real y una computación periférica de alto rendimiento para procesar las entradas sin introducir retrasos operativos. A pesar de estos retos, la fusión sigue siendo esencial para las operaciones C-UAS modernas, especialmente cuando el volumen y la complejidad de las amenazas superan lo que puede gestionar un solo sensor.
Modelización de la detección, el seguimiento y la identificación
La modelización de la detección, el seguimiento y la identificación en una arquitectura contra UAS subraya una realidad operativa clave: ningún sensor por sí solo proporciona una cobertura completa contra toda la gama de amenazas de los sUAS. El sencillo modelo DTID presentado anteriormente puede beneficiarse de un rigor adicional a la hora de captar las complejidades de la detección, el seguimiento y la identificación.
Cada modalidad (RF, radar, EO/IR, acústica) aporta ventajas distintas, pero también limitaciones inherentes. La resiliencia de la misión requiere una red de sensores distribuida que pueda absorber el ruido ambiental, adaptarse al volumen de amenazas y adaptarse a la diversidad de drones que se utilizan. La integración requiere tanto la creación de redes de sensores como la gestión de compensaciones:
- Latencia: el tiempo desde la detección inicial hasta la señal de ataque se mide en segundos y, a corta distancia, en milisegundos; el retraso afecta directamente a la probabilidad de derrota.
- Compromiso de la firma: Los emisores activos, como los radares o los telémetros láser, corren el riesgo de exponer las posiciones amigas a los sistemas de guerra electrónica del adversario, que pueden dar la señal a los activos de fuego enemigos para que lancen ataques.
- Límites ambientales: El clima, el terreno y el ruido de fondo pueden degradar el rendimiento acústico y óptico, especialmente a bajas altitudes.
- Cobertura y coste: Ningún campo de sensores puede proporcionar una cobertura de 360 grados en rangos variados sin crear cargas presupuestarias y logísticas.
Ninguna red de sensores C-UAS es perfecta, pero su eficacia aumenta exponencialmente cuando se construyen en torno a principios de redundancia, señalización de baja latencia y fusión inteligente de datos. Cuanto más rápido se detecte, clasifique y transmita una amenaza, más probable será que una respuesta cinética o no cinética interrumpa su cadena de ataque antes de que pueda ejecutarse. En un entorno de drones de alto ritmo, el tiempo es decisivo.
Evaluación de las arquitecturas de sensores CUAS mediante simulación
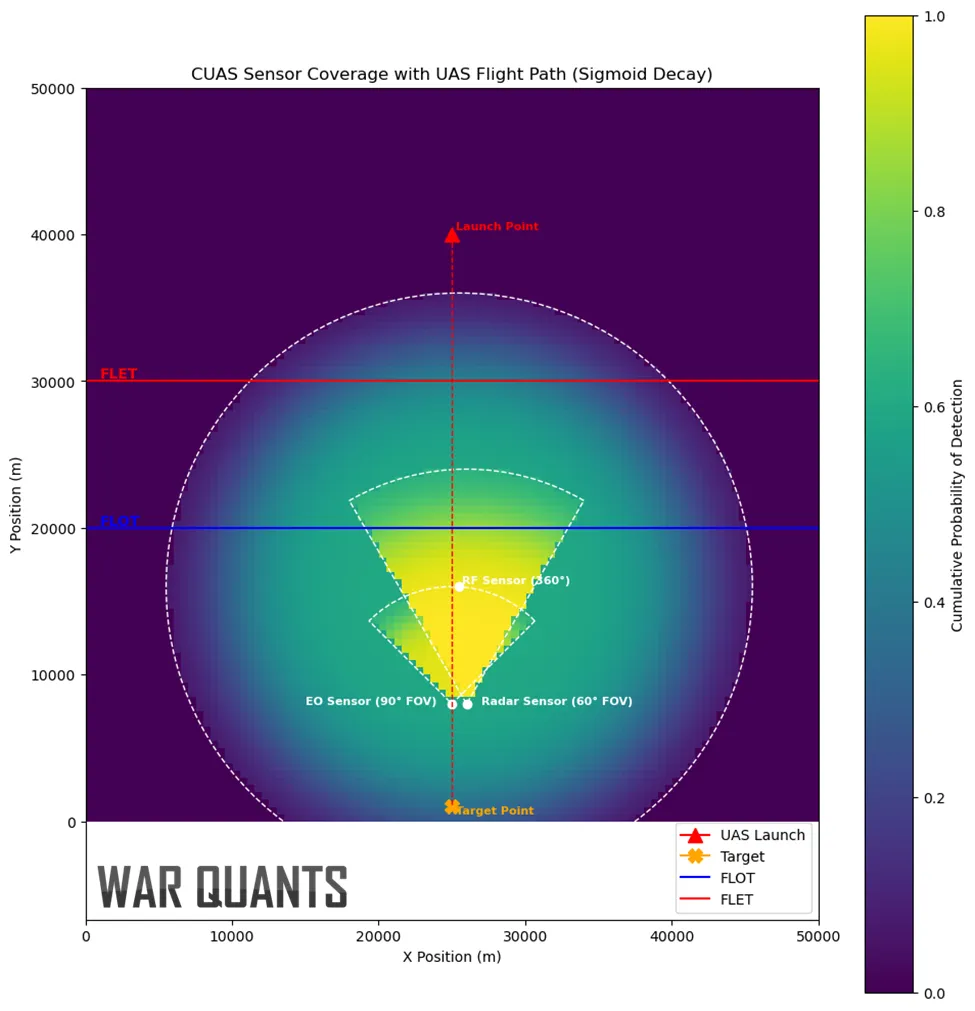
Para comprender el empleo de los sensores, los analistas pueden utilizar sencillas cuadrículas de probabilidad de detección para probar diferentes configuraciones de sensores y requisitos de capacidad. Las cuadrículas de probabilidad de detección dividen el campo de batalla en cuadrantes y estiman la probabilidad de detección en función de la disponibilidad y la disposición de los sensores. De forma similar a un boceto de plan de fuego, permiten a los comandantes disponer sus sensores para mitigar mejor la amenaza de los sUAS. Consideremos el siguiente escenario: dos adversarios se enfrentan a lo largo de una línea de frente relativamente estática definida por una línea delantera de tropas amigas (FLOT) y tropas enemigas (FLET) con una tierra de nadie entre ellas. La fuerza adversaria lanza un sUAS desde detrás de la FLET para atacar infraestructuras críticas detrás de la FLOT. En este escenario, la fuerza amiga tiene un sensor RF pasivo cerca de la FLOT que detecta el sUAS cuando pasa por la FLET. A continuación, ese sensor pasivo activa un radar activo que rastrea el sUAS mientras se desplaza sobre la FLOT hacia el punto objetivo. Por último, un sensor EO pasivo identifica el sUAS del adversario, estableciendo las condiciones para su derrota. Los tres sensores se integran en la red de destrucción CUAS.
Podemos comparar los sensores utilizando curvas de probabilidad de detección que muestran cómo el alcance del sensor afecta a la detección. En este caso, las curvas comparan la detección a partir del mismo punto para realizar una comparación relativa.
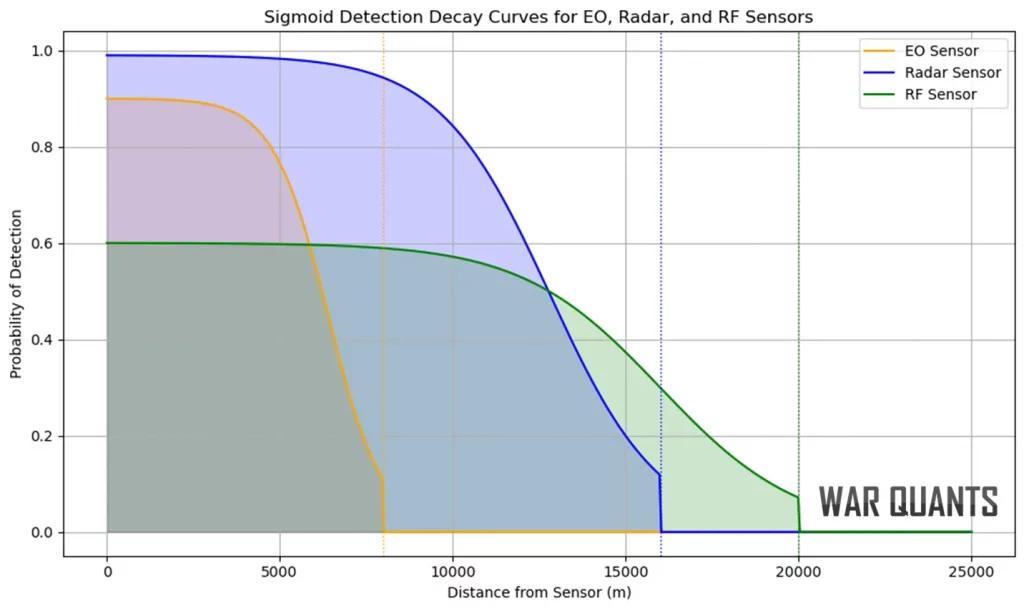
Este ejemplo utiliza curvas sigmoideas de detección-decaimiento, en las que la detección disminuye lentamente y luego cae rápidamente, alcanzando cero en el alcance efectivo máximo con fines ilustrativos.
Ahora imagine este escenario a mayor escala con 30 sUAS adversarios.
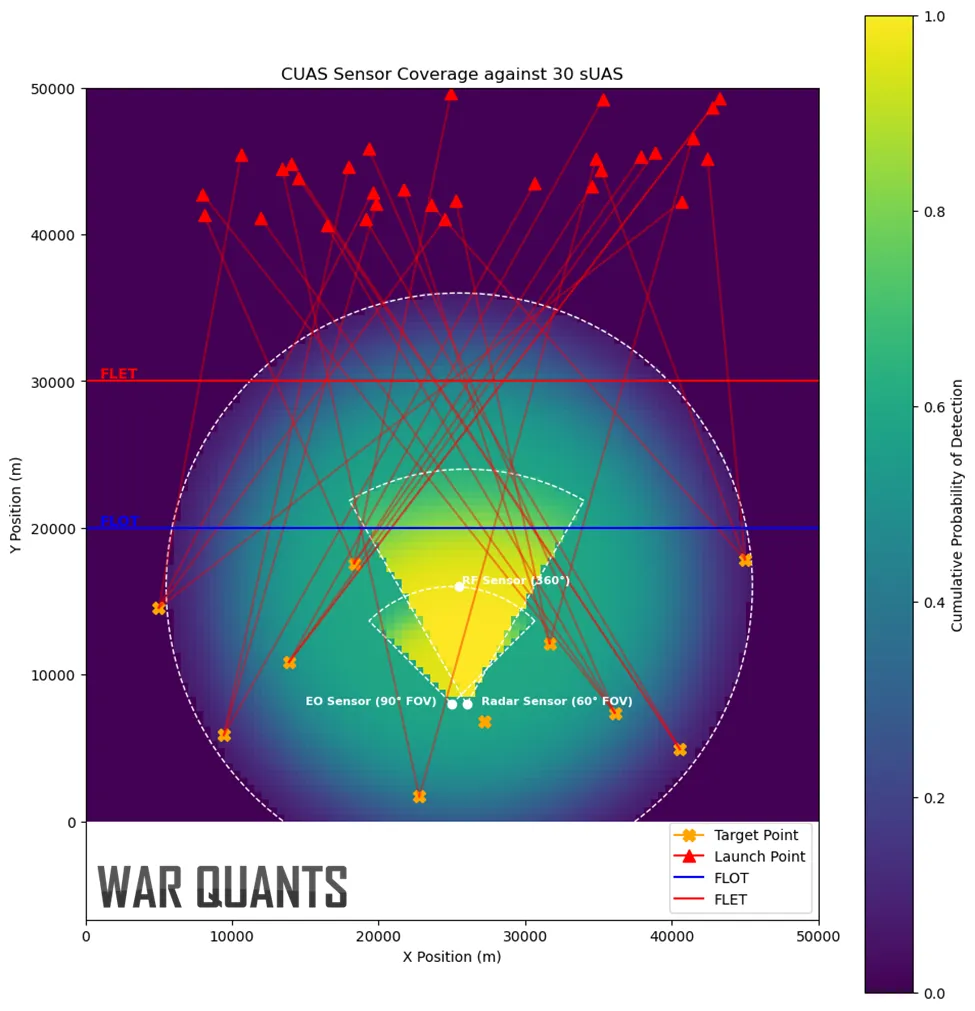
A medida que aumenta el número de objetivos potenciales, la capacidad de los sensores limitados para cubrir todos los puntos suele disminuir. En este caso, 30 sUAS atacan 10 objetivos. Aunque el sistema CUAS puede detectar los sUAS del adversario que se mueven por el campo de batalla, el seguimiento y la identificación de aquellos que no pasan por el radar y los campos de visión EO probablemente resultarán difíciles con un único sensor pasivo.
Hacia una detección más inteligente y decisiones más rápidas
Los campos de batalla modernos requieren algo más que mejores antenas o sensores aislados. Exigen un enfoque de detección integrado que combine diversas tecnologías en un único sistema con capacidad de respuesta. Ningún sensor individual puede defenderse por completo contra la creciente variedad de pequeños drones. Sin embargo, la combinación de sensores mediante la fusión inteligente y la planificación basada en la simulación puede colmar las lagunas. A medida que los drones se vuelven más rápidos, baratos y autónomos, el rendimiento de la red de sensores desempeñará un papel fundamental en la determinación de los resultados. Una colocación más inteligente de los sensores permite tomar decisiones más rápidas, y cada segundo cuenta.
Glosario de Acrónimos
ATP – Army Techniques Publication (Publicación de Técnicas del Ejército)
C2 – Command and Control (Mando y Control)
CUAS / C-UAS – Counter-Unmanned Aircraft System (Sistema Contra Aeronaves No Tripuladas)
DTID – Detect, Track, Identify, Defeat (Detección, Seguimiento, Identificación, Derribo)
EO/IR – Electro-Optical/Infrared (Electro-Óptico/Infrarrojo)
FLET – Forward Line of Enemy Troops (Línea Frontal de Tropas Enemigas)
FLOT – Forward Line of Own Troops (Línea Frontal de Tropas Propias)
FPV – First-Person View (Vista en Primera Persona)
ISR – Intelligence, Surveillance, Reconnaissance (Inteligencia, Vigilancia, Reconocimiento)
RCS – Radar Cross-Section (Sección Recta Radar)
RF – Radio Frequency (Frecuencia de Radio)
RFML – Radio Frequency Machine Learning (Aprendizaje Automático en Radiofrecuencia)
SUAS / sUAS – Small Unmanned Aircraft System (Sistema de Aeronave No Tripulada Pequeña)
TDOA – Time-Difference-of-Arrival (Diferencia de Tiempo de Llegada)
UAS – Unmanned Aircraft System (Sistema de Aeronave No Tripulada)
Las opiniones y puntos de vista expresados en War Quants son los de los autores y no reflejan necesariamente la política o la posición oficial del Gobierno de los Estados Unidos, el Departamento de Defensa o cualquier otra agencia u organización.